해석목적
• 가장 극한의 위치 상태에서 장비의 자중에 의한 연직방향 처짐과 베이스의 응력 및 구조 안전성 검토
• 취출에 대한 성능 (처짐, 응력)을 유지한 질량 최적화설계 (Mass Optimization)
• 취출로봇의 효율성, 내구성, 신뢰성의 확보를 위한 안전성 검토

대형 취출 로봇 모델
해석모델 및 해석조건
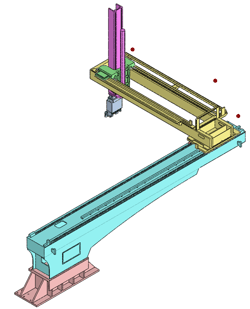
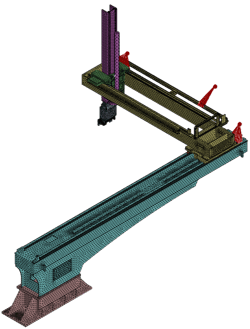
대형 취출 로봇의 캐드 모델 및 FE 모델
-
• 요소 수 : 193,342 개
-
• 절점 수 : 356,441 개
-
• 자유도 : 1,072,539 개
-
• 하중조건 : 구조물 자중
-
• 접촉조건 : 각 파트 사이는 선형 강체연결 접촉 적용
-
• 구속조건 : 구조물 베이스에 완전구속조건 적용
해석결과
선형정적해석 - 중력에 의한 처짐 및 응력 검토
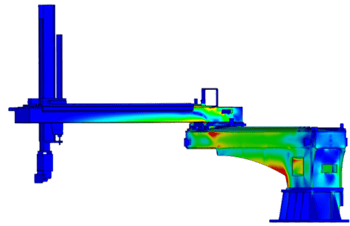
취출로봇의 응력 분포 결과
취출로봇의 변형분포
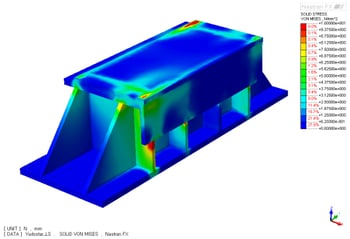
베이스부 응력 분포 결과
모드해석
모드해석 1차모드
3차모드
5차모드
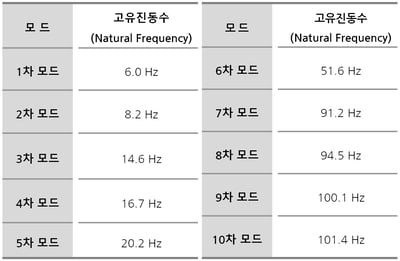
모드 차수별 고유진동수




